So I’m sure all of you have seen one of theses at least once, most likely on a visit to a hospital, this device is called a pulse oximeter. This device measures your heart rate and oxygen levels in your blood. The way it works is but having two leds on one side of the finger, usually red and infra-red, and on the other side a phototransistor or light dependant resistor(LDR). When blood passes through your finger, a different amount of light reaches the light sensor and the output spikes because of this.
This device measures your heart rate and oxygen levels in your blood. The way it works is but having two leds on one side of the finger, usually red and infra-red, and on the other side a phototransistor or light dependant resistor(LDR). When blood passes through your finger, a different amount of light reaches the light sensor and the output spikes because of this.
 You could use either the red or IR led for this but if you want to calculate the blood oxygen levels you’d need both. Oxygenated blood lets more red light through and deoxygenated blood lets more IR light through and by alternating the leds and comparing the outputs, you can calculate oxygen levels but in this project I’m just going to be measuring the heart rate.
You could use either the red or IR led for this but if you want to calculate the blood oxygen levels you’d need both. Oxygenated blood lets more red light through and deoxygenated blood lets more IR light through and by alternating the leds and comparing the outputs, you can calculate oxygen levels but in this project I’m just going to be measuring the heart rate.
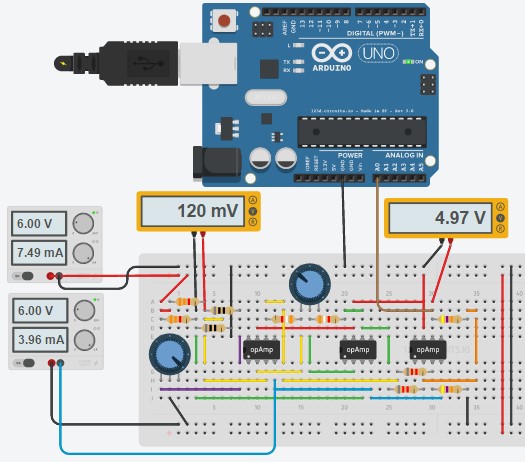
I wanted to make a simple heart rate monitor so I used cheap components that I had lying around so it definitely isn’t the best heart rate monitor around but it works. From a bit of googling I found a few other people with the same idea, one being Scott Harden which built this device a few years ago that could also be used to record an ECG, his post about building it can be found here, he also has lots of other great projects give it a visit. I used his circuit as reference from mine, I didn’t have the exact same values for each component but choose ones that were close. My circuit can be shown below:

You may Have seen an op amp with this symbol as well
Continue reading →
")






 So because accelerometers measure acceleration due to gravity this would have to be canceled to isolate the acceleration caused by the movement, this wouldn’t be too difficult if all 3 axes from the accelerometer and gyro were being recorded, using some 3d vector and trig calculations this could be done easily enough but a problem I faced was having a fixed sample rate and other sensors which had to be recorded alongside the ACC and gyro, this meant that only the necessary axes from these two could be recorded.
So because accelerometers measure acceleration due to gravity this would have to be canceled to isolate the acceleration caused by the movement, this wouldn’t be too difficult if all 3 axes from the accelerometer and gyro were being recorded, using some 3d vector and trig calculations this could be done easily enough but a problem I faced was having a fixed sample rate and other sensors which had to be recorded alongside the ACC and gyro, this meant that only the necessary axes from these two could be recorded. 